
MEMS Movies
Most Donald Lab MEMS movies are now available on our YouTube channel.
Also provided below are movies of our MEMS devices and MEMS microrobots. The devices, and what you see in the movies, are described in our papers, which are available online, and, somewhat more telegraphically, on these webpages.
All movies on this site are copyrighted © by The Donald Laboratory at Duke University (1990-2017).All Rights Reserved, All Wrongs Reversed.
An Untethered, Electrostatic, Globally-Controllable MEMS Micro-Robot
-
Supplementary
material and videos are available for the following papers:
- Supplementary
material:
B. R. Donald et al.
"Planar Microassembly by Parallel Actuation of MEMS Microrobots." Journal of Microelectromechanical Systems 2008; 17(4): 789-808. » - Supplementary
material:
B. R. Donald et al.
"An Untethered, Electrostatic, Globally-Controllable MEMS Micro-Robot", Journal of Micro-Electromechanical Systems, 2006; 15(1): 1-15.» - Papers on our MEMS work: »
- Press Releases/News articles »
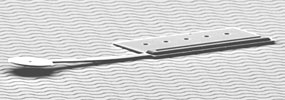
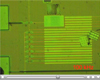
We present a steerable, electrostatic, untethered, MEMS micro-robot, with dimensions of 60 µm by 250 µm by 10 µm. This micro-robot is 1 to 2 orders of magnitude smaller in size than previous micro-robotic systems. The device consists of a curved, cantilevered steering arm, mounted on an untethered scratch drive actuator. These two components are fabricated monolithically from the same sheet of conductive polysilicon, and receive a common power and control signal through a capacitive coupling with an underlying electrical grid. All locations on the grid receive the same power and control signal, so that the devices can be operated without knowledge of their position on the substrate and without constraining rails or tethers.
Movies
Supporting material:
New microrobot papers and videos
Press Release
Microrobot Ballet Video
Microassembly Video








These videos may not be used for commercial or for-profit purposes. All movies Copyright © Bruce Donald and his co-workers (see the corresponding papers for dates and precise lists of co-authors). Enjoy!