
Microelectromechanical Systems (MEMS), Nanoscience, and Microrobotics: Micro Actuator and Micro Manipulation Systems
Please click on a project image below to read more.
All movies on this site are copyrighted © by The Donald Laboratory at Duke University (1990-2017).All Rights Reserved, All Wrongs Reversed.

|
|
|

|
|

|
|
|

Igor Paprotny and Bruce Donald with 1,000x scale models of our micro-robots


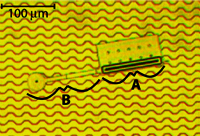
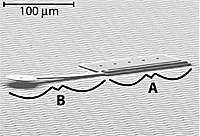
A Steerable, Untethered, 250 x 60 µM MEMS Mobile Micro-Robot

The goal of this research is to build microsystems that can actively, accurately, and efficiently interact and change the physical world. While so far MEMS research has been biased more towards sensor technology, there are a large number of potential applications that require micro actuators. Important examples are techniques to efficiently move, sort, or mix small particles (e.g. cells in biotechnology applications); or micro positioning devices for inspection and assembly of complex micro systems (e.g. for display or amplifier arrays). Here is an article of general interest (PDF) on our work. Our research in this area also includes:
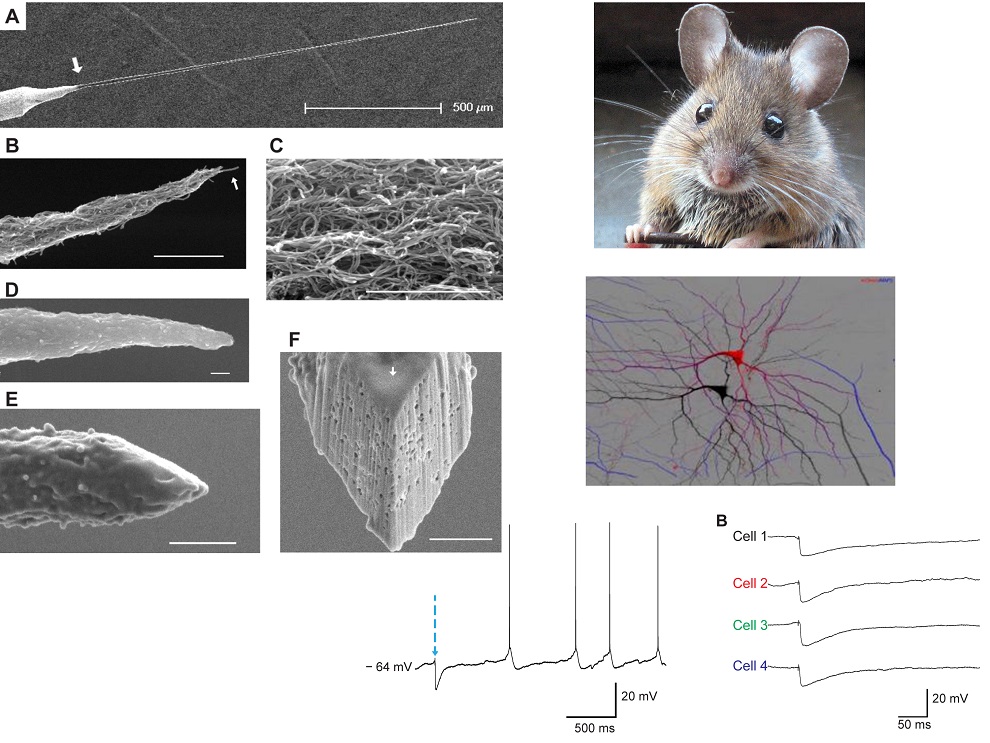
Nanotechnology for Neuroscience
How we perceive and interact with the world depends on the structure and function of the synapses in our brain. Understanding the neural mechanisms of perception and behavior thus rests on measuring the synaptic activity associated with perceptual and behavioral functions. Existing intracellular recording methods are capable of resolving synaptic activity in anesthetized animals, but anesthesia necessarily interferes with perception and behavior. Moreover, the fragility and poor electrical properties of conventional intracellular electrodes render them poorly suited for measuring synaptic activity in the freely behaving animal as it actively engages with its environment. The overarching goal of our research is to develop a novel intracellular recording device using nanotechnology and microelectromechanical systems (MEMS) and to assess its suitability for in vivo intracellular recordings in the freely behaving animal. We work in collaboration with Dr. Rich Mooney (Neurobiology) and Dr. Gleb Finkelstein (Physics).
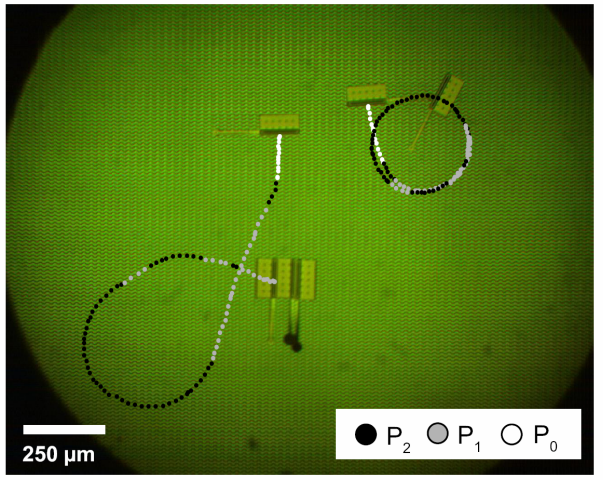
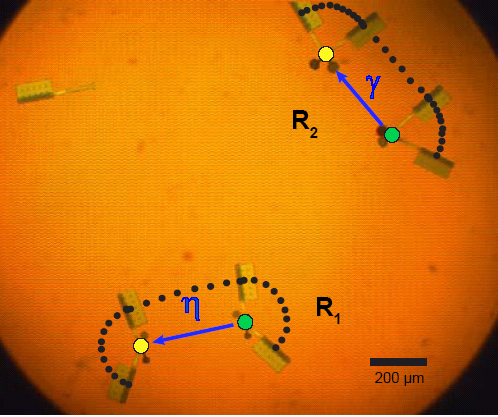
Untethered Microrobots and Microassembly
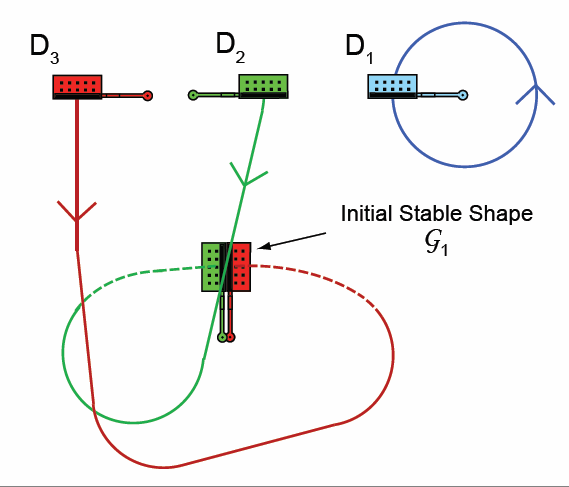
We use the term microrobot to denote mobile untethered MEMS robots with their dimensions strictly confined within a 1 mm3 cube. We have developed designs, theory and the results of fabrication and testing for a novel parallel microrobotic assembly scheme using muptiple stress-engineered MEMS microrobots.
We have recently presented the results of experiments and testing of a first implementation of an untethered, multi-microrobotic system. We fabricated and tested 15 microrobots, and used these devices to implement a new type of planar microassembly.
Supporting material:
- New microrobot papers and videos
- Press Release
- Microrobot Ballet Video
- Microassembly Video
- PDF reprints/preprints of our recent papers on multiple untethered microrobots and Microassembly.
- Microrobot Movies
- Streaming video: Inaugural Lecture of the MIT Nanotechnology Public Lecture Series (April 2007). (Announcement)
- MEMS Microrobots: More Press coverage and videos
Micromanipulation with biomimetic cilia arrays »
- Demos
- MEMS Movies
- More demos
- Biological systems for distributed control
- Towards artificial flagella
Single-crystal silicon actuator arrays »
We are also interested in applications and connections between MEMS and biotechnology, particularly Structural Molecular Biology/Drug design.
Controlling possibly thousands or millions of microactuators raises some fundamental computational problems. To tackle this challenge we have developed a theory of programmable force fields: