

Igor Paprotny

Micro-robotics / MEMS (MicroElectroMechanical Systems). The focus of this research project is the development of a distributed micro-robotic system where the size of the entire device is in the order of micro-meters (10-6 meters).
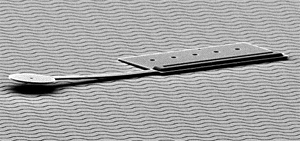
Our goal is to achieve a self-reconfigurable robotic system, where a group of simple robotic devices can change their configuration (shape) based on a provided global control signal, and their interaction with the environment. This is a new assembly paradigm we call Directed Micro-scale Self-Assembly (DMSA).
Micro-robot Movies
References
- An Untethered, Electrostatic, Globally-Controllable MEMS Micro-Robot (with B. R. Donald, C. Levey, C. McGray, and D. Rus). Journal of Microelectromechanical Systems, 2006; 15(1):1-15. [PDF, Supplementary Material (Videos)]
- A Steerable, Untethered, 250 x 60 µm MEMS Mobile Micro-Robot (with B. R. Donald, C. Levey, C. McGray, and D. Rus). 12th International Symposium of Robotics Research (ISRR), October 12-15, 2005, San Francisco, CA. [PDF]
In the Press
- Dartmouth press release (2005), video, and photos
- New York Times, 10/11/05 [PDF]
- New Scientist, 9/16/05
- MSNBC, 9/15/05
- Discover Magazine, 2006: 26(2), p.16. [PDF]
- Popular Science